Automated Guided Vehicle
Define a Problem

Goals of the Project:
- Create a VEX Automated Guided Vehicle
- Create code that fits the criteria
- Have the project work effectively

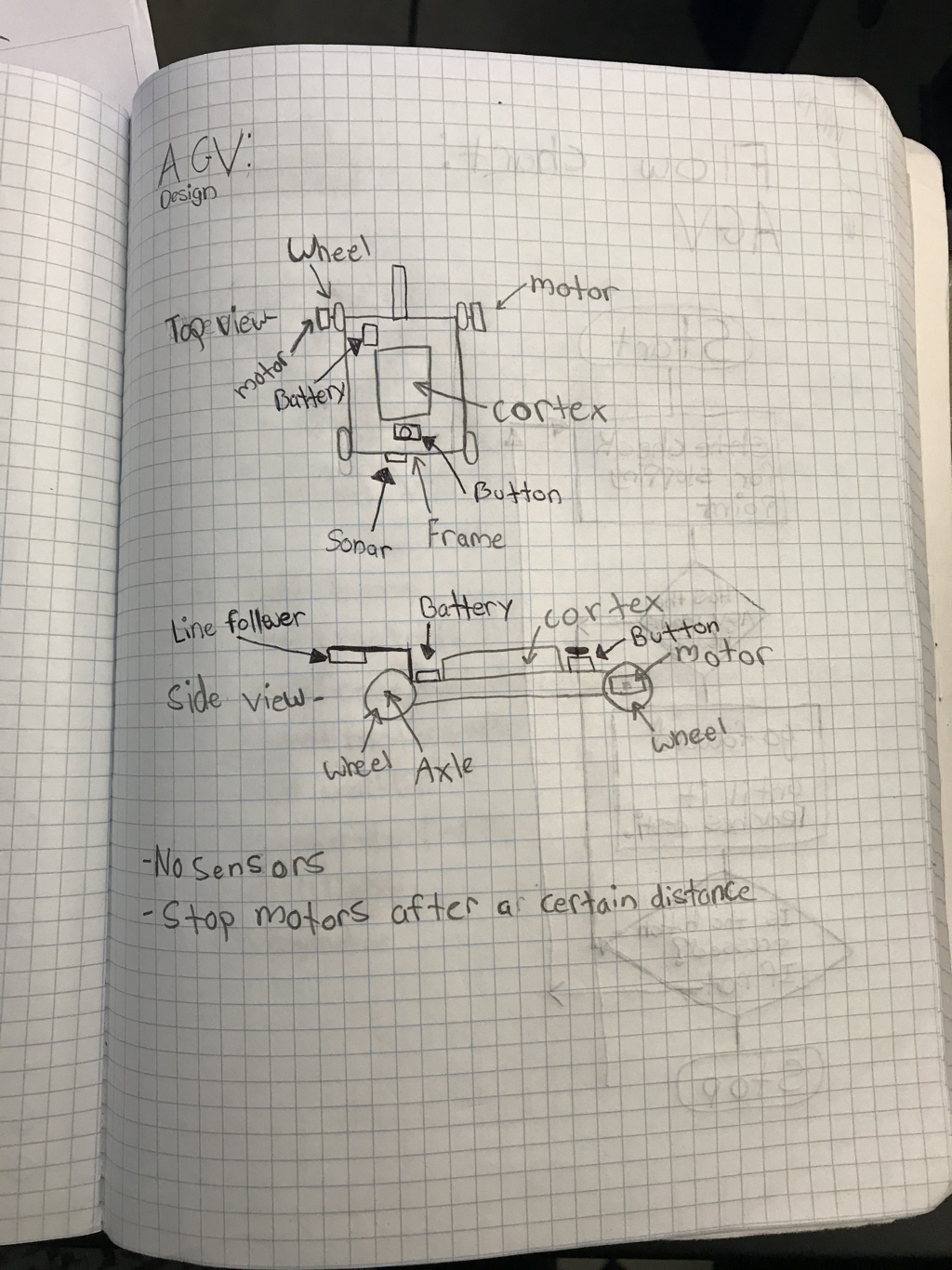
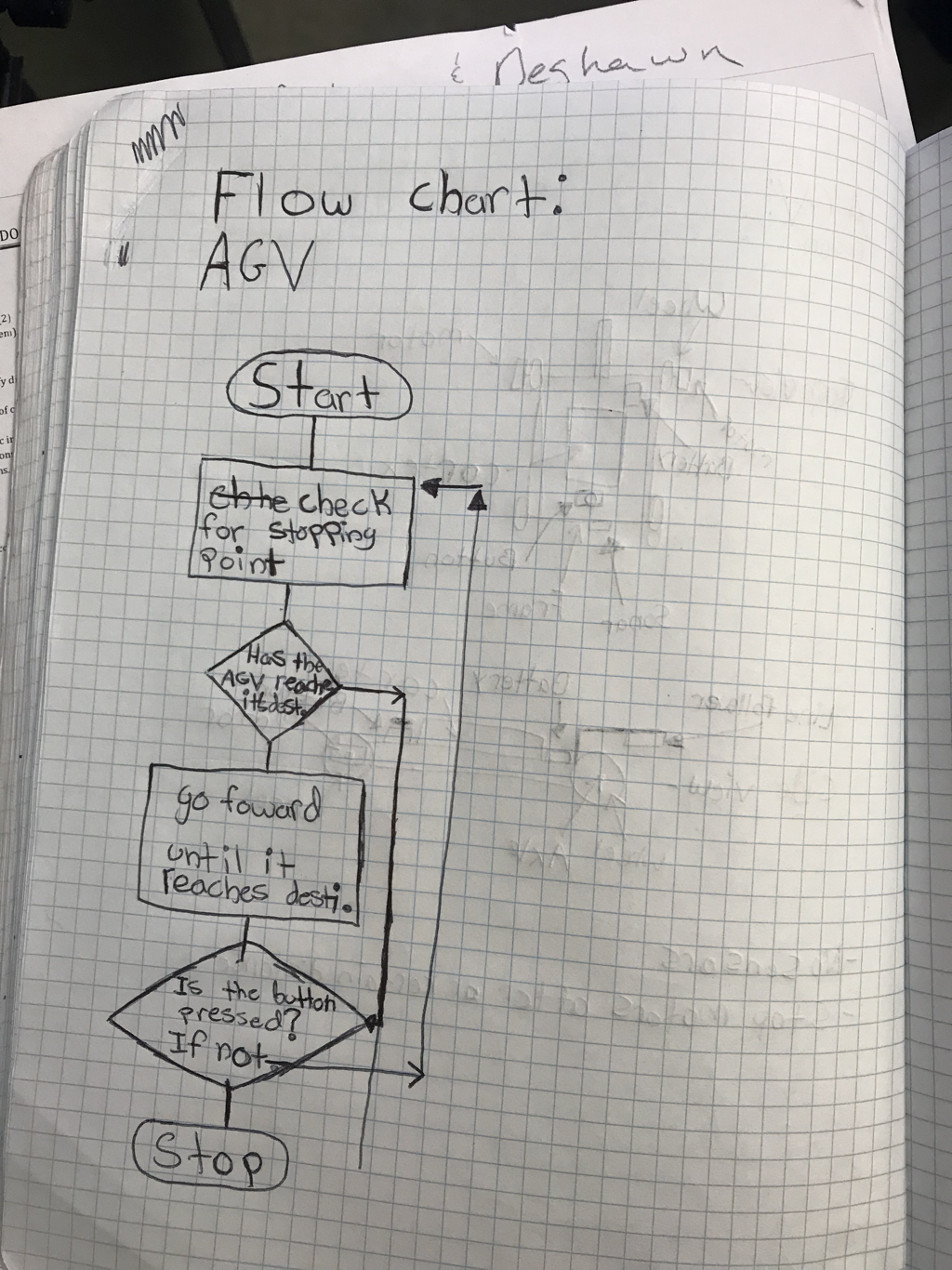
Generate Concepts
|
Dylan:

|
Deshawn:
|


|

|

Develop A Solution
The prototype was started by using the initial design and seeing if it was feasible and changing from there on out if need be. The coding used the initial plan too until a few problems were encountered, but they were fixed.
Construct and Test Prototype
Signature on sheet no online explanation needed.
Evaluate Solution
The only problems encountered with the building was how parts were too big or lopsided, so I had to add an extra set of wheels and make the body longer. The same sensors were used, but a button was added later after revising the problem statement. The coding worked every time, but the problem was making it fit the constraints. In the end we did a closed loop system that started with a button, but stopped with sensors. The troubleshooting techniques I used was just to test it and if it didn't work change it or put it back the way it was.
Present A Solution
|
|
|
Conclusion
The programming we applied here was a while loop that started with a button press and ended with a line follower and that continued forever as long as the button was pressed. The most surprising aspect of the project to me was how there was view complications with the programming and that it worked most of the time, the hardware was easy. The most difficult part was figuring out a program that fit the constraints. One feature that would of helped to make the design better would be knowing how far the AGV needed to travel. This would help by making the sensor values exact and efficient. Another feature that would help would be a description of exactly how the code needed to function, like did it need an emergency switch or to stop by button, etc.
